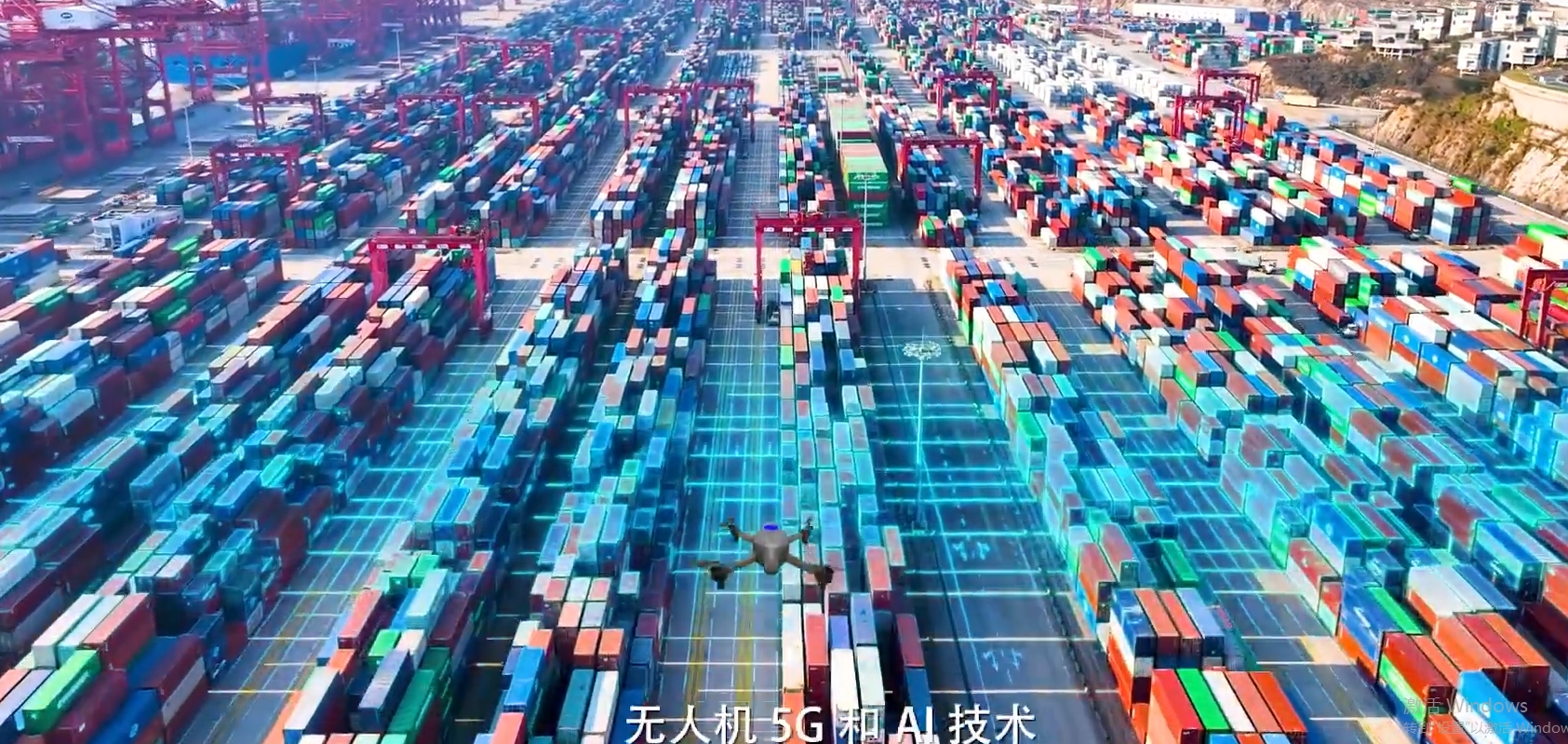
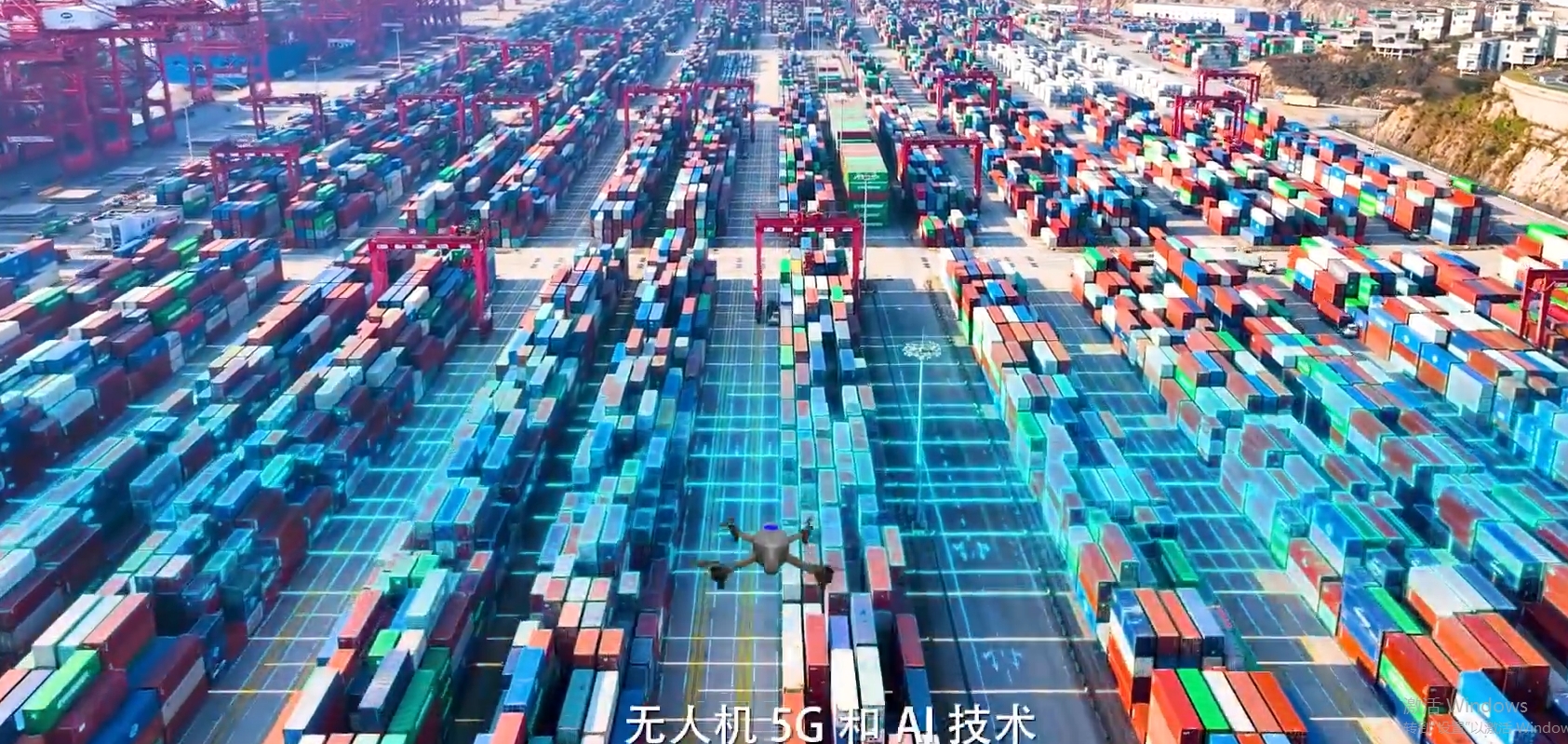
无人机集装箱箱号识别系统主要通过以下步骤实现箱号的自动识别:
1 图像捕获
无人机携带高清摄像头对集装箱进行空中拍摄,获取集装箱表面的图像。这一步要求摄像头具备高分辨率和快速响应能力,以确保在复杂光照和环境条件下也能获取清晰的图像。
2箱号定位
在捕获到的图像中,系统通过边缘检测、形态学处理或基于先验知识的模板匹配等方法,准确定位集装箱箱号的位置。
3字符分割
系统将箱号区域中的各个字符进行分割,以便后续逐一识别。字符分割技术包括基于轮廓的分割、像素分布分析等。
4字符识别
分割后的字符通过AI识别或OCR+AI技术进行识别。系统会提取字符的轮廓特征、像素分布特征等,并与预训练的字符库进行比对,最终组合成完整的箱号。
5数据处理与传输
识别结果通过无人机的数据传输系统发送至数据中心或管理平台,进行进一步的处理和存储。同时,系统可以将识别结果与数据库中的信息进行比对,确认箱号的准确性。
6异常处理
如果识别结果存在异常(如污损、模糊或识别错误),系统会将异常结果发送至工作人员进行人工复核,并更新相关信息。
7深度学习优化
为了提高识别的准确性和效率,系统通常会结合深度学习算法,通过大量的图像数据训练模型,使其能够更好地应对复杂环境(如光照变化、字符污损等)。
这种识别方式不仅提高了集装箱管理的效率,还减少了人工操作的误差,尤其适用于大型集装箱堆场和港口等场景。





 113
113 2025-02-24
2025-02-24
 无人机集装箱箱号识别系统怎么识别的
无人机集装箱箱号识别系统怎么识别的